RobotStudio是款十分好用的机器人仿真编程工具。RobotStudio电脑版可以让你在电脑内制作一个虚拟的机器人,帮助用户进行离线编程。RobotStudio基于abb虚拟控制器构建,用户利用其强大的虚拟控制器在机器人生产环境之外运行仿真编程程序,使用车间相同的机器人程序和配置文件来执行相当逼真的机器人仿真设计工作


RobotStudio
最新版 v6.07人工检测,安全无毒
57.00KB
简体
WinAll
编程软件
414次
2023-10-25
23
软件介绍
RobotStudio是款十分好用的机器人仿真编程工具。RobotStudio电脑版可以让你在电脑内制作一个虚拟的机器人,帮助用户进行离线编程。RobotStudio基于abb虚拟控制器构建,用户利用其强大的虚拟控制器在机器人生产环境之外运行仿真编程程序,使用车间相同的机器人程序和配置文件来执行相当逼真的机器人仿真设计工作
软件特色
1、编程,软件既是仿真软件,又是编程软件可以把编好的程序下载到真实机器人中
2、在线作业,使用软件与真实的机器人进行连接通信,对机器人进行便捷的监控、程序的修改、参数的设定、文件的传送、程序的备份与恢复等等。
3、构建工作站,软件可以创建工作站,并且模拟真实场景,测量节拍时间,这样工作人员就可以在办公室把整个工作站流水线生产测试。构建工作站时,软件支持cad、ug、sw等软件模型导入:iges、vrml、catia、sat、vdafs等格式。
4、自动分析伸展能力,此功能可以测量机器人能够到达哪些位置,优化工作站单元布局。如图中,阴影部分就是机器人可达到的区域。
5、自动生成路径,在一些不规则的轨迹,通常人为示教是比较麻烦,并且效率低。我们可以使用自动生成路径功能,把生成好的路径下载到真实机器人中,大大提高效率。
6、碰撞监测,碰撞监测功能可以测量机器人与周边设备是否会碰撞,确保机器人离线编程得出的程序的可用性。
7、二次开发,提供二次开发的功能,使工作人员更方便的调试机器人以及更加直观的观察机器人生产状态。
软件功能
【CAD导入】
RobotStudio可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
【AutoPath】
RobotStudio中最能节省时间的功能之一。该功能通过使用待加工零件的CAD模型,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置路径,而这项任务以往通常需要数小时甚至数天。
【程序编辑器】
程序编辑器ProgramMaker可生成机器人程序,使用户能够在Windows环境中离线开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
【路径优化】
如果程序包含接近奇异点的机器人动作,RobotStudio可自动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视器是一种用于机器人运动优化的可视工具,红色线条显示可改进之处,以使机器人按照最有效方式运行。可以对TCP速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
【Autoreach】
Autoreach可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。
【虚拟示教台】
是实际示教台的图形显示,其核心技术是VirtualRobot。从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台QuickTeach?上完成,因而是一种非常出色的教学和培训工具。
【事件表】
一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
【碰撞检测】
碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio可自动监测并显示程序执行时这些对象是否会发生碰撞。
【Visual Basic for ApplicationsVBA】
可采用VBA改进和扩充RobotStudio功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
【PowerPac's】
ABB协同合作伙伴采用VBA进行了一系列基于RobotStudio的应用开发,使RobotStudio能够更好地适用于弧焊、弯板机管理、点焊、CalibWare绝对精度、叶片研磨以及BendWizard弯板机管理等应用。
【直接上传和下载】
整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于ABB独有的VirtualRobot技术。
安装步骤
1.在本站下载RobotStudio安装包,解压后,双击exe程序,进入安装向导,单击下一步
2.阅读许可协议,点击“我接受...”,单击下一步
3.选择安装类型,单击下一步
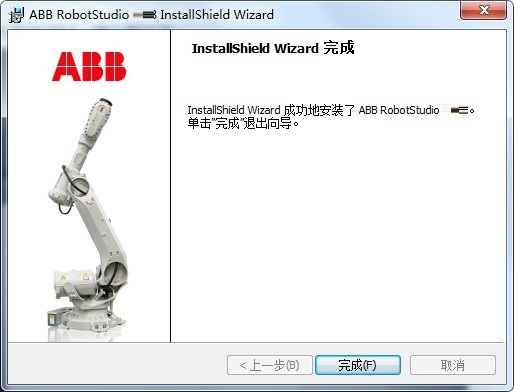
4.RobotStudio安装完成,单击完成退出安装向导
使用方法
系统创建
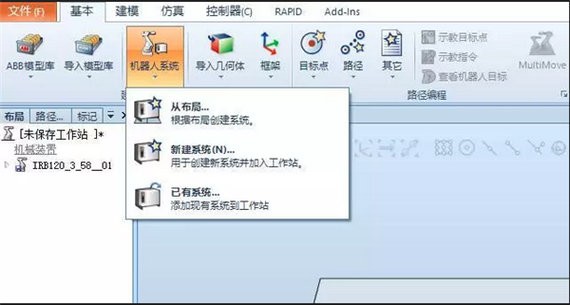
1、点击“机器人系统”工具,选择“根据已有布局创建系统”,弹出从布局创建系统对话框,输入系统名称、系统保存位置,点击下一个
2、点击下一个。弹出系统选项,点击“选项”按钮,弹出更改选项对话框。在类别下点击“default language”,选项下取消勾选english,勾选“chinese”,为机器人系统选择简体中文语言。点击确定按钮,点击完成按钮,如WinWin7分享的下图所示:开始配置机器人系统,在下方状态栏展示进度。待右侧控制器状态变为绿色,机器人控制配置完成。
3、点击“保存”图按钮,输入保存名称,保存项目。
导入机器人
在“基本”功能选项卡的“abb模型库”中,提供了几乎所有的机器人产品模型,作为仿真所用,如WinWin7分享的下图所示:
单击选择其中型号为irb120的机器人,确定好版本,点击确定即可。在实际应用中,要根据项目的要求选定具体的机器人型号及相关版本或者承重能力及到达距离等参数。
建立机器人系统
要为机器人创建系统,使它具有电气的特性来完成相关的仿真操作。具体操作如图所示,首先在“基本”功能选项卡下,单击“机器人系统”的“从布局......”如WinWin7分享的下图所示:
然后设定好系统的名称和保存的位置后,单击“下一个”;选择机械装置,再单击“下一个”;点击“选项”,为系统添加中文选项,勾选“644-5 chinese”点击“确定”,点击“完成”,如WinWin7分享的下图所示:
系统建立完成后,可以看到右下角“控制器状态”为绿色,即可操作工业机器人。
更新日志
将bug扫地出门进行到底
优化用户反馈的问题,提升细节体验
小编寄语
RobotStudio可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。RobotStudio最新版可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。

Python集成开发编程工具
专业版 v2026.1.2 / 120MB
1.1W 570 2026-05-21

开源服务软件
最新版 V2.54.0 / 120MB
1.0W 524 2026-04-21

代码生成工具
最新版 / 120MB
8.9K 446 2023-10-23

好用的图形处理工具
官方免费版v6.0.0 / 120MB
8.8K 439 2025-08-13

Ruby集成开发环境
最新版 / 120MB
8.5K 426 2023-10-21

网站快速成型工具
官方版 v2.13.2 / 120MB
8.3K 416 2026-04-13

编程开发设计软件
官方版 v2024.3.6 / 120MB
7.8K 390 2025-03-28

儿童图形化编程学习软件
v3.1.1 / 120MB
7.3K 366 2025-05-14

实用型商业数学软件
中文版 vR2020a / 120MB
7.2K 362 2026-04-13

跨平台代码重构工具
最新版 / 120MB
6.9K 343 2023-10-25
